Marzo 31, 2026
Possedere un solido modello concettuale per l’acquisizione delle abilità motorie è un requisito di importanza strategica per ogni professionista del movimento umano. La sua rilevanza si estende attraverso un ampio spettro di discipline, dall’organizzazione delle sessioni di coaching e insegnamento alla pianificazione di programmi terapeutici e riabilitativi, fino alla progettazione di attrezzature ergonomiche. Da tempo, il campo è stato dominato da una dicotomia fondamentale: da un lato, le teorie tradizionali che modellano il cervello come un computer, un esecutore di programmi motori pre-archiviati; dall’altro, un approccio contemporaneo che vede l’atleta come un sistema dinamico complesso, in continua interazione con il proprio ambiente. Lo scopo di questo saggio è analizzare questo fondamentale cambio di paradigma, illustrando come l’approccio basato sui vincoli offra un quadro più potente e accurato, con profonde implicazioni pratiche per tutti gli “addetti ai lavori”. Per comprendere appieno la portata di questa rivoluzione concettuale, è essenziale partire dall’analisi del paradigma che ha a lungo costituito il fondamento del nostro approccio all’apprendimento.
——————————————————————————–
Le teorie tradizionali sull’acquisizione delle abilità motorie sono state profondamente influenzate dall’ascesa della scienza cognitiva e dalla potente metafora del computer. Questi modelli, pur con le loro differenze, hanno fornito per decenni il linguaggio e i concetti per spiegare come il sistema nervoso centrale (SNC) controlli il movimento. Framework teorici come le teorie dell’associazione, le teorie neuromaturazionali, la teoria degli stadi di Fitts, le teorie dell’elaborazione delle informazioni e le teorie neurocomputazionali condividono una visione del discente come un processore di informazioni, il cui obiettivo primario è sviluppare e perfezionare rappresentazioni interne del mondo e delle azioni necessarie per interagirvi.
Le caratteristiche comuni di questi approcci possono essere sintetizzate come segue:
Le implicazioni pratiche di questo paradigma sono dirette e pervasive. Per un allenatore o un insegnante, l’obiettivo diventa quello di aiutare il discente a costruire e memorizzare il programma motorio “ideale”. Ciò si traduce in metodi di insegnamento che enfatizzano la pratica ripetitiva per “incidere” il programma, la scomposizione del compito (part-task practice) in parti più semplici per ridurre il carico cognitivo, e l’uso di istruzioni verbali dettagliate per prescrivere la tecnica corretta. Tuttavia, l’incapacità di questo paradigma di rendere conto in modo convincente dei fenomeni di novità, flessibilità e adattabilità del movimento—il cosiddetto “degrees of freedom problem” introdotto da Bernstein—ha reso manifesti i suoi limiti teorici, imponendo la ricerca di una nuova prospettiva.
——————————————————————————–
I limiti dei modelli tradizionali, in particolare la loro difficoltà nello spiegare la flessibilità, la novità e l’adattabilità del movimento umano, hanno reso necessaria l’adozione di un nuovo quadro teorico. Questa prospettiva alternativa non vede più l’individuo come un processore di informazioni, ma come un sistema dinamico complesso intrinsecamente accoppiato al proprio ambiente. Questo approccio si fonda su due pilastri teorici complementari: la Teoria dei Sistemi Dinamici, che spiega come i pattern di movimento si formano, e la Psicologia Ecologica, che chiarisce come l’informazione ambientale guida l’azione. Mentre la Teoria dei Sistemi Dinamici offre il “motore” del cambiamento – spiegando come i pattern di movimento emergono e si auto-organizzano – la Psicologia Ecologica fornisce il “sistema di guida”, chiarendo come l’informazione ambientale specifica e modella l’azione.
La Teoria dei Sistemi Dinamici modella il performer come un “sistema complesso”, un sistema caratterizzato da molti componenti interagenti (i gradi di libertà, come muscoli e articolazioni), comportamento non lineare e, soprattutto, la capacità di auto-organizzazione. Questo concetto è fondamentale: pattern di coordinazione funzionali possono emergere spontaneamente dall’interazione tra le componenti del sistema, in risposta a determinati vincoli, senza la necessità di un programma motorio centrale che li prescriva. Esempi naturali di auto-organizzazione, come la formazione di stormi di uccelli o banchi di pesci, illustrano come l’ordine a livello macroscopico possa nascere da interazioni locali, senza un leader che impartisca comandi.
In questo quadro, i pattern di movimento stabili e funzionali sono chiamati attrattori. Essi rappresentano gli stati preferiti del sistema, poiché rappresentano configurazioni di massima stabilità ed efficienza energetica. Il passaggio da un attrattore a un altro, ad esempio dal camminare al correre con l’aumentare della velocità, è definito transizione di fase, un cambiamento spontaneo che avviene quando un vincolo (in questo caso, la velocità) raggiunge un valore critico.
In netto contrasto con la visione tradizionale che la considera “rumore”, la Teoria dei Sistemi Dinamici vede la variabilità come una proprietà funzionale e indispensabile del sistema motorio. La variabilità non è un errore da eliminare, ma una risorsa che permette flessibilità, adattamento e l’esplorazione di nuove e più efficaci soluzioni motorie.
Un esempio illuminante è il cosiddetto “controllo a forma di imbuto” (funnel-shaped control), osservato da Bootsma & van Wieringen (1990) nei giocatori esperti di tennistavolo. All’inizio del colpo, la traiettoria della racchetta mostra un’elevata variabilità. Questa elevata variabilità iniziale non è un difetto, ma una risorsa funzionale che consente al giocatore di adattarsi in tempo reale alla traiettoria della palla e, al contempo, di mascherare le proprie intenzioni all’avversario. Man mano che il movimento progredisce verso il punto di contatto, la variabilità si riduce drasticamente, garantendo la massima precisione nel momento cruciale dell’impatto. Questo dimostra come gli atleti esperti non eliminino la variabilità, ma la sfruttino in modo funzionale.
La Psicologia Ecologica, sviluppata da J.J. Gibson, fornisce il secondo pilastro, spiegando la relazione tra percezione e azione. Il suo principio cardine è la percezione diretta: l’informazione necessaria per guidare l’azione non viene elaborata cognitivamente a partire da dati sensoriali grezzi, ma viene raccolta direttamente dall’ambiente.
Insieme, questi due pilastri teorici dipingono un quadro radicalmente nuovo del discente: non più un computer che esegue programmi, ma un sistema complesso e auto-organizzante, strettamente accoppiato al proprio ambiente, che esplora e scopre soluzioni motorie funzionali. L’Approccio Basato sui Vincoli traduce queste potenti idee in un modello operativo per la pratica.
——————————————————————————–
L’Approccio Basato sui Vincoli (Constraints-Led Approach, CLA) rappresenta il quadro pratico che unifica le intuizioni della Teoria dei Sistemi Dinamici e della Psicologia Ecologica. Questo approccio ridefinisce radicalmente l’apprendimento: non si tratta più di memorizzare un programma motorio, ma di un processo di ricerca e scoperta in cui le soluzioni motorie emergono dall’interazione dinamica di un insieme di vincoli. Il professionista del movimento non insegna una tecnica, ma guida questo processo di scoperta.
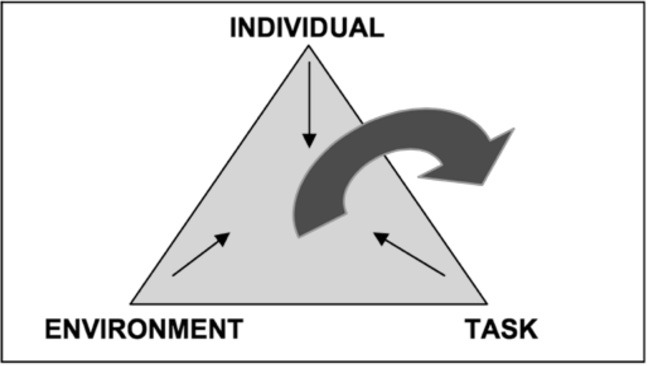
Al centro del CLA si trova il modello proposto da Newell (1986), che classifica i vincoli in tre categorie interdipendenti. Il comportamento motorio osservabile è il risultato emergente dell’interazione continua tra questi tre elementi.
| Categoria di Vincolo | Descrizione ed Esempi |
| Organismici | Questi vincoli sono le caratteristiche uniche dell’individuo. Includono fattori strutturali (es. geni, altezza, peso, forza) e funzionali (es. cognizioni, motivazione, stato emotivo, dinamiche intrinseche). |
| Ambientali | Si riferiscono alle variabili globali dell’ambiente fisico e sociale. Esempi includono la gravità, la luce, la temperatura, la superficie di gioco, ma anche le aspettative sociali e culturali. |
| Del Compito (Task) | Questi vincoli sono specifici dell’obiettivo da raggiungere. Comprendono le regole del gioco, le dimensioni dell’attrezzatura, e le caratteristiche dello spazio di azione (es. linee di demarcazione, reti, pali). |
Per visualizzare il processo di apprendimento nel CLA, si utilizza la metafora del paesaggio percettivo-motorio. Ogni discente possiede un paesaggio unico, modellato dall’interazione dei vincoli, in cui ricerca stati di coordinazione stabili e funzionali, o attrattori (le valli profonde del paesaggio).
Le dinamiche intrinseche rappresentano la topografia iniziale del paesaggio del discente: alcune valli (pattern motori) sono già profonde e facilmente accessibili, modellate da genetica ed esperienze precedenti, mentre altre aree sono ancora inesplorate e montuose. In questo contesto, lo scopo della pratica è cercare, esplorare, scoprire, assemblare e stabilizzare pattern di movimento funzionali e affidabili. Il discente è guidato a scoprire e stabilizzare nuove e più efficaci valli nel paesaggio attraverso l’interazione con i vincoli sapientemente manipolati dal professionista.
Questo modello impone una ridefinizione radicale del ruolo dell’allenatore, dell’insegnante o del terapista. Non più un istruttore che prescrive una tecnica “corretta”, ma un facilitatore che progetta l’ambiente di apprendimento, un architetto di vincoli che guida il processo di scoperta individuale. Questo approccio pedagogico prende il nome di Pedagogia Non Lineare.
——————————————————————————–
La Pedagogia Non Lineare è l’applicazione pratica dell’Approccio Basato sui Vincoli. Essa trasforma il professionista — sia esso un allenatore, un insegnante o un terapista — in un “architetto dell’ambiente di apprendimento”. Il suo compito primario non è più fornire istruzioni prescrittive, ma manipolare strategicamente i vincoli per guidare il discente verso la scoperta autonoma di soluzioni motorie efficaci. Questo approccio, definito “hands-off”, promuove un apprendimento più profondo, adattabile e individualizzato.
La manipolazione dei vincoli del compito è lo strumento più potente a disposizione del professionista per modellare il paesaggio percettivo-motorio del discente.
La Pedagogia Non Lineare riconsidera anche il modo in cui vengono fornite le istruzioni verbali. Studi condotti da Wulf e colleghi hanno evidenziato una differenza critica tra due tipi di focus attenzionale:
Le evidenze scientifiche dimostrano in modo consistente che un focus esterno porta a un apprendimento più efficace, a una migliore ritenzione della skill e a una performance più automatica. Le istruzioni verbali, quindi, non dovrebbero essere usate per prescrivere una tecnica universale, ma per dirigere l’attenzione del discente verso le conseguenze ambientali delle sue azioni, lasciando che il suo sistema motorio si auto-organizzi per raggiungere l’obiettivo.
Anche l’apprendimento osservativo (modeling) viene reinterpretato. Dal punto di vista della percezione visiva, ciò che l’osservatore raccoglie non è una serie di posizioni statiche da imitare, ma il moto relativo tra gli arti e i segmenti corporei del modello. La dimostrazione, quindi, non fornisce una “soluzione da copiare”, ma agisce come un vincolo informativo che canalizza l’esplorazione del discente, accelerando la scoperta di una soluzione motoria funzionale e individuale. L’osservazione di una soluzione funzionale aiuta il discente a restringere il campo di ricerca e a convergere più rapidamente verso un pattern di coordinazione efficace e adatto alle proprie caratteristiche.
——————————————————————————–
Questo saggio ha tracciato un percorso dal modello riduzionista del “cervello come computer” a una visione olistica del “performer come sistema complesso e auto-organizzante”, dimostrando la necessità e la superiorità del secondo. Il messaggio chiave è che le abilità motorie non sono programmi rigidi memorizzati nel sistema nervoso, ma soluzioni flessibili ed emergenti che nascono dall’interazione dinamica e continua tra l’individuo, il compito e l’ambiente.
Il potere di questo approccio risiede nel suo rispetto per la complessità e l’unicità di ogni discente. La Pedagogia Non Lineare, applicazione pratica di questi principi, non cerca di sopprimere la variabilità e l’individualità, ma le sfrutta come motori dell’apprendimento. Invece di formare esecutori di tecniche standardizzate, questo approccio coltiva individui più adattabili, resilienti e autonomi nel risolvere problemi motori, fornendo ai professionisti non solo un nuovo set di strumenti, ma una nuova filosofia per coltivare il potenziale umano nel suo ambiente naturale.